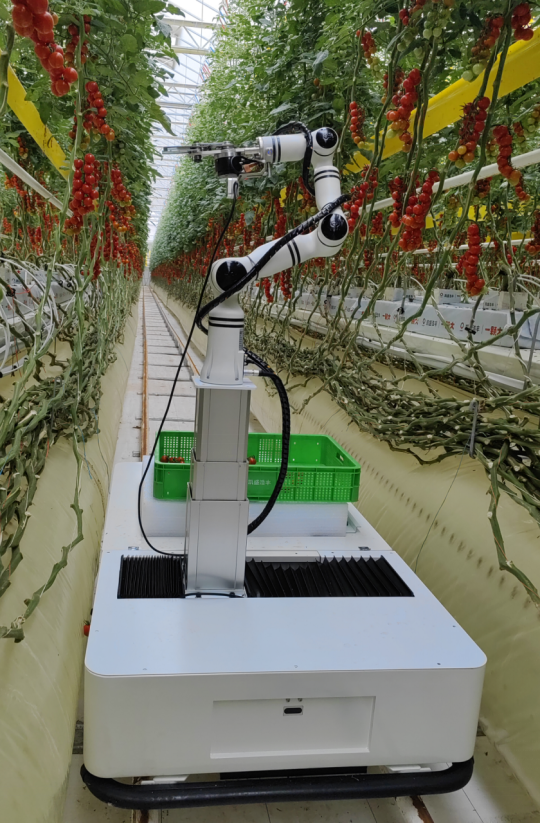
技术特点:1. 融合人工智能和多传感器技术,采用基于深度学习的视觉算法,引导机械手臂完成识别、定位、抓取、切割、放置任务的高度协同自动化系统2. 利用自主研发采摘工具或软体夹具对多种果蔬能够进行采摘3. 采摘需要同运输协作相结合,做到采摘、搬运一体化温室解决方案4. 果实精准采收1)立体视觉精准判别可采摘番茄果实的大小、颜色、形状、成熟度和采摘位置定位2)轻巧型7自由度机械臂,轻松完成路径规划、采摘和放篮多个任务...
技术特点:1. 自由定制式的拖动农业通过在种植软件中的地图上拖放植物来直观地设计所需的农场。使用者通过游戏般的界面,仅仅几分钟就可以学会操作,并进入管理农场的状态。作物在栽种后可自动进行间隔和种植调控2. 栽培方案针对特定作物,可建立一个完整的方案来护理其完整的生命周期。通过在植物不同的成长时间段给它设置相应的程序去控制机器人帮助其生长。因为方案是可以被重复使用的,这样就可以在再次植物节省你的时间和精力3...
技术特点:1. 实时环境感知监控系统1)搭载温度、湿度和 CO2 传感系统,实时精准感知环境信息2)多视角、多目视觉系统,实现上下和转动,覆盖可见光、近红外波段,结合导航系统、栽培模式,实时监测温室状态和作物生长状况。2. 果实成熟度检测与计数智能算法基于AI深度学习和机器视觉算法,开发温室番茄果实识别算法、成熟度检测算法和果实数量统计算法,可对温室果实品质及产量进行评价和估测3. 多地形作业与自主导航1)针对温...
技术特点:1. 四转四驱的高地隙设计,具备较高的运动精度和定位精度1)高灵活性,高通过性,对不同地形有较好的适应性2)高地隙设计提高了作业效率,减少对作物的损伤2. 电动自走式田间中耕除草作业机器人针对穴播或移栽类作物垄间和株间精准机械式除草3. 搭载镜头对杂草进行扫描,激光或物理方式进行除草4. 搭载导航系统、传感器或其他各种农田信息采集设备,能够实现自主导航和智能路径规划,并实时采集农田环境参数和作物生长状...